
Hur servomekanismen fungerar inom industriell automation?
Servo-mekanismen är ett element som är oupplösligt kopplat till begreppet industriell automation, där precision och repeterbarhet måste upprätthållas. Den vanligaste användningen av servomekanismer inom industriell automation är att kontrollera positionen för maskinelement (t.ex. huvud), justera rotationshastigheten hos rotor, kontrollera spänningar och tryckkraft eller upprätthålla ett konstant vridmoment. Men låt oss gå tillbaka till grunderna och definiera frågor relaterade till servot.
Vad är servomekanismen?
Ett servo, ibland även kallat servodriv, servo eller servomotor, är en typ av enhet som utför rotationsrörelse för att driva komponenter i en maskin.
Egenskaper hos servomekanismer
Servomekanismer kan ha olika dimensioner och parametrar som är anpassade efter behoven i en viss applikation.
Generellt sett, inom elektronikproduktion, är ett servodriv en grundläggande styrmodul för automatisering av industriella enheter eller maskiner i ett slutet system. De elektroniska komponenterna i servot möjliggör omvandling av analoga eller digitala styrsignaler till exakt rörelse hos ändelementen. Servomekanismen möjliggör precis justering av parametrarna för acceleration, hastighet och kraften hos glidande ändelement baserat på feedback. Servomekanismens funktion baserad på feedbackprincipen utförs av en encoder med potentiometer.
Servomekanismer har flera viktiga egenskaper:
Möjlighet att flytta stora och tunga komponenter
Kapabla att arbeta med mycket höga positiva och negativa accelerationer
Arbeta vid höga hastigheter
Noggrann kontrollförmåga och positionsfeedback
Låg känslighet för arbetsmiljöförhållanden
Konstruktion av servot
Servomekanismer består av 5 nyckelkomponenter. Dessa är:
Motor
Driver med förstärkare
Encoder
Växel
Mekaniskt hölje
Servodriv / servomotor - motorn i servot
Motorn i servomekanismen är en av dess grundläggande komponenter som möjliggör kontroll av exakt position hos det roterande elementet i form av motoraxeln, dess acceleration och rotationshastighet. Servomekanismen drivs av en likströms- (DC) eller växelströmsmotor (AC), som kan användas för precisionsstyrning av rörelse. Servon används ofta i applikationer där precision och/eller hög kraft krävs.
Servomotorn styrs via en styrmodul. Den hjälper till att upprätthålla exakt position för det roterande elementet genom att utföra precisa och noggranna rörelser av ändelementen. Motorn genererar kraft som överförs till de roterande delarna via växeln.
Driver med förstärkare - Hur styr man servot?
En styrmodul krävs för att kontrollera servot, vilket hjälper till att upprätthålla den exakta positionen för det roterande elementet och lagrar alla parametrar för servo-förstärkarna. Denna metod tillåter servot att göra precisa och exakta rörelser hos ändelementet.
Servot styrs elektroniskt, inte mekaniskt. Detta gör styrsystemet mycket exakt och precist.
Vad används servo-encodern till?
Encodern är ett element som vanligtvis är fysiskt placerat i servomotorn. Den används främst för att kontrollera motorns position, mäta hastighet och rotationsriktning. Dess funktion gör det möjligt att upprätthålla exakt motorkontroll.
Det finns två typer av encoders: relativa och absoluta. Relativa encoders mäter förskjutningen från nollpositionen, som oftast ställs in efter uppstart eller via programvara. Absoluta encoders behöver däremot ingen spänning för att bestämma sin position. Deras nollposition är förbestämd vid produktion och är alltid exakt på samma plats.
Servomekanismen med encoder är en mekanism som möjliggör exakt kontroll av mekaniska rörelser. Denna mekanism används inom många områden, såsom industriell automation, flyg och elektronik. Servot består av en motor, växel och encoder.
Servomotorn driver växeln, som i sin tur kontrollerar arbetsstycket. Encodern används för att mäta motorhastighet och rotationsriktning samt för att övervaka arbetsdelens position. I ett servo är encodern en typ av rörelsestyrningssensor som ansvarar för att ge feedback till styrsystemet. Den fungerar genom att omvandla maskindelars roterande eller linjära rörelse till en elektrisk signal. Denna signal läses till exempel av en räknare eller maskinens PLC i styrsystemet och bestämmer exakt position för olika maskinelement, vinkeln, antal varv på motoraxeln, rotationshastighet, dess riktning och position. Tack vare detta tillvägagångssätt är det möjligt att upprätthålla exakt motorkontroll i servot.
Servoöverföring
Växellådan är mekanismen som överför energin som genereras av motorn till det slutliga arbets elementet. Under överföringen av energi till arbets elementet är det möjligt att samtidigt ändra dess vridmoment och hastighet. Idén är att överföra elektricitet från magnetspolen till axeln. Det är också möjligt att ändra rotationsriktningen genom att svänga åt höger eller vänster.
En viktig punkt att nämna är övergången från rotationsrörelse till linjär rörelse och vice versa. Växlar i servomotorer får ofta även funktionen att överföra energi över ett avstånd, vilket görs genom att använda till exempel en kilrem eller kedja. När det gäller servomekanismer är de mest använda mekaniska växlarna de som kännetecknas av hög effektivitet och hög precision.
Det finns ett stort urval av mekaniska växlar inom industrin som ofta används i servomotorer.
De mest populära mekaniska transmissionerna är:
kugghjulsväxel,
friktionsväxel,
kabelöverföring,
remöverföring,
kilremsöverföring,
kedjeöverföring,
lager växel,
snäckväxel,
planetväxel.
Det finns också andra typer av växlar på marknaden, de klassificeras enligt de fysiska fenomen som används, vilka är:
hydrauliska transmissioner,
pneumatiska växlar,
elektriska växlar.

Servo mekaniskt hölje
Det mekaniska höljet för servomotorerna ansvarar för två huvudfunktioner:
skyddar motorn mot skador vid externa mekaniska och miljöfaktorer,
möjliggör montering av motorn i en enhet eller maskin.
Höljen för servodriv är oftast tillverkade av metaller, främst aluminiumlegeringar.
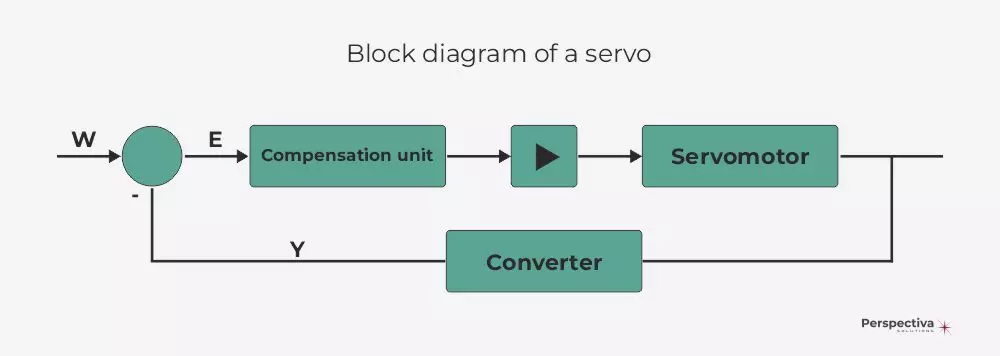
Hur fungerar servomekanismen?
Servomotorn ansvarar för att rotera maskinens axlar. Med andra ord omvandlar den den elektriska energi som tillförs till den till mekanisk energi i rotationsrörelse. Den mekaniska energin från motorn överförs inte direkt, utan genom växlar som justerar axlarnas rotationshastighet till önskad nivå. De reglerar även vridmomentet. Motorns funktion styrs av en styrmodul som mottar information från en annan enhet (t.ex. PLC-styrenhet). Styrmodulen genererar, baserat på denna information, lämpliga elektriska signaler för att styra motorn. En annan mycket viktig komponent är encodern. Den är placerad i återkopplingsslingan och ger styrmodulen information om motorns aktuella position. Detta möjliggör precis kontroll av rotationsrörelsen.
Olika typer av servodriv kan ha ett ganska brett spektrum av möjligheter och konstruktioner. Ändå, med viss förenkling, kan vi anta att de innehåller alla ovanstående komponenter.
De viktigaste parametrarna för servon är:
arbetstid vid överbelastning,
vridmoment och rotationshastighet,
upplösning,
frekvenssvar,
gränssnitt,
dimensioner,
nätverksalternativ,
vridmoment till tröghetsförhållande.
Olika typer av servodriv kan ha ett ganska brett spektrum av alternativ och konstruktioner. Ändå, med viss förenkling, kan vi anta att de innehåller alla ovanstående komponenter.
Återkopplingsslinga i servo
Återkopplingsslingan ger information om arbetsstyckets aktuella position. Detta gör det möjligt för styrmodulen att exakt kontrollera motorn för att uppnå önskad servoposition. Servoåterkoppling spelar en nyckelroll för servots precision. Återkopplingsutgången är viss data (t.ex. position, hastighet, acceleration, förskjutning). Vi skiljer mellan positiv och negativ återkoppling.
Hur fungerar återkoppling i ett servo?
Styrmodulen använder en återkopplingsslinga och en encoder för att läsa motorns aktuella position. Den kontrollerar sedan det önskade inställda värdet för positionen som motorn ska ha. Drivmodulen beräknar skillnaden mellan dessa värden. Om den är lika med noll innebär det att motorn har nått den erforderliga positionen. Om den däremot är olika noll, beräknar styrmodulen korrigeringen (offset) och driver motorn tills skillnaden mellan inställningen och den faktiska uppmätta positionen är noll.
Servoåterkopplingen uppnås genom direkt kontroll av motorns elektromagnetiska fält. Denna process kallas ofta ”fasstyrning”. Vid fasstyrning utförs kontroll av det elektromagnetiska fältet för att uppnå önskad hastighet och vridmoment. Fasstyrning används ofta, till exempel, i trappstegsservo-drivningar som måste vara mycket exakta.
Datorstyrning av servodriv utförs ofta med ett styrkort. Korrekt fasjustering kräver att styrkortet kan läsa information från encodern och justera det elektromagnetiska fältet till önskad inställning. För vissa applikationer kan det dock även vara nödvändigt att avgöra om axeln roteras åt vänster eller höger.
Användningsområden för servomekanismer
Servomekanismer används i många industrier. De är kritiska komponenter för maskinernas korrekta och effektiva funktion. Servot används särskilt i olika typer av industriella maskiner, automation, robotik och modellbyggande. Servots huvuduppgift i maskiner är att bestämma motoraxelns position, dess synkronisering samt eliminering av styrfel, t.ex. förskjutningsfel.
Servomekanismer kan också användas när det är nödvändigt att exakt styra ett roterande element. Ofta används servon inom industrin för att säkerställa noggrann och exakt produktion. De kan även användas för att kontrollera objekt som behöver flyttas i en specifik ordning. Som ett resultat används servon ofta i produktionslinjer där de driver produktionslinjen eller andra maskinelement.
Servomekanismer kan ha olika dimensioner och parametrar anpassade efter behovet i en viss applikation. De kan även ha ytterligare tillbehör (t.ex. skidlyft, förgreningskablar, minidatorer). En specifik egenskap hos servomekanismer är deras integrerande natur av ställdonet med dynamik som inte hindrar reglering, men som i sin tur medför icke-linjäritet i deras egenskaper. På grund av detta kräver servon användning av proportionella regulatorer med hög förstärkning eller trepoliga förstärkare.
Servomekanismer används i applikationer såsom:
spakar och strömbrytare,
ventiler och spjäll,
persienner och jalusier,
spakmekanismer,
handverktyg,
industriell automation,
industrirobotik,
flygplan,
jordbruksmaskiner,
CNC-maskiner,
bilar,
modellbygge.
Hur väljer man servo för sin applikation?
När man väljer rätt servo för industriell automation bör flera faktorer beaktas:
typ av servo (analog, digital),
storlek (t.ex. mikro, standard) – beroende på modell skiljer de sig i storlek och vikt,
servo kraft – bestämmer vridmomentet som genereras på servospaken,
hastighet på dess funktion – bestämmer hastigheten som servot roterar den olastade draglinan,
typ av växel (t.ex. metall, kol) – ett av elementen som genererar servokraften,
applikationsspecifik – individuellt val av servo för en viss enhet.
Konstruktion av signal-kablar som används i servomekanismer
Korrekt val av kabelsats för en servo-driven maskin är en mer komplicerad process än man kan tro. Anslutningen av kablar till servot är ett nyckelelement för maskinens korrekta funktion och för det effektiva anslutningssystem som används i maskiner av olika typer. Det underskattas dock ofta. När det gäller kablar som används i servodriv är det avgörande att inse att arbetsmiljön för dessa enheter vanligtvis är områden med mycket hög nivå av så kallad elektromagnetisk smog. Det finns många enheter runt servot som genererar störningar i form av elektromagnetiska vågor. Därför måste kablarna som används i servodriv vara utformade så att störningar inte påverkar servots funktion, till exempel de värden som läses av encodern.
Kablarna som används i servon måste uppfylla flera viktiga krav:
måste effektivt skärma (blockera) elektromagnetiska vågor tack vare kablar med lämplig fyllnadsgrad av sidoytan med skärmning,
ha hög mekanisk motståndskraft,
kunna utföra ett angivet antal böjningscykler vid placering i kabelkedja,
visa motståndskraft mot kemikalier som kan finnas i arbetsmiljön för en servo-driven maskin.
Sammanfattningsvis är det viktigt att kablar som arbetar med servomotorer utvecklas och tillverkas med specialistkunskap och omsorg. Annars kan servot helt enkelt inte fungera.
Utforska våra tjänster relaterade till servon
Note: The use of graphics from the article ”How the servo mechanism works in industrial automation?” is allowed as long as the source (link to the page) is mentioned.
Suggested articles related to the topic of servos
- Own production vs. outsourcing – when to commission contract production
- Production outsourcing – The optimal solution for scaling company
- How the electric harness is produced?
- Prototyping of machine wiring
- Bespoke cable harness: designing an electric harnesses for the customer needs
- How to choose an electrical harness correctly?
Popular articles on our blog:




Author