
Hvordan servoen fungerer i industriel automation
Servomekanisme er et element, der er uadskilleligt forbundet med begrebet industriel automation, hvor præcision og gentagelighed skal opretholdes. Den mest almindelige anvendelse af servomekanismer i industriel automation er styring af maskinelementers position (f.eks. hovedet), justering af rotorers rotationshastighed, kontrol af belastninger og trykkraft eller opretholdelse af et konstant drejningsmoment. Men lad os gå tilbage til det grundlæggende og definere emner relateret til servoen.
Hvad er servomekanisme?
En servo, også nogle gange kaldet en servodrive, servo eller servomotor, er en type enhed, der udfører rotationsbevægelse for at drive komponenter i en maskine.
Egenskaber ved servomekanismer
Servomekanismer kan have forskellige dimensioner og parametre, tilpasset behovene i en given anvendelse.
Generelt set er en servodrive i elektronikproduktion et grundlæggende kontrolmodul til automatisering af industrielle enheder eller maskiner i et lukket system. De elektroniske komponenter i servoen muliggør konvertering af analoge eller digitale styresignaler til præcis bevægelse af endeelementerne. Servomekanismen gør det muligt at justere parametrene for acceleration, hastighed og kraften af glidende endeelementer baseret på feedback. Betjeningen af servomekanismen, baseret på feedback-princippet, udføres af en encoder med potentiometer.
Vigtige egenskaber ved servomekanismer:
Mulighed for at flytte store og tunge komponenter
Kan arbejde med meget høje positive og negative accelerationer
Arbejder ved høje hastigheder
Præcis kontrol og positionsfeedback
Lav følsomhed over for arbejdsmiljøets forhold
Konstruktion af servoen
Servomekanismer består af 5 nøglekomponenter:
Motor
Driver med forstærker
Encoder
Gear
Mekanisk hus
Servodrive / servomotor – motoren i servoen
Motoren i servomekanismen er et af dens grundlæggende elementer, som muliggør kontrol af den præcise position af det roterende element i form af motorakslen, dens acceleration og rotationshastighed. Servomekanismen drives af en elektrisk DC- eller AC-motor, som kan bruges til præcis bevægelseskontrol. Servoer bruges ofte i applikationer, hvor præcision og/eller stor kraft skal opretholdes.
Servomotoren styres af en controller, som hjælper med at opretholde den præcise position af det roterende element ved at udføre nøjagtige og præcise bevægelser af endeelementerne. Motoren genererer kraft, der overføres til de roterende elementer via gear.
Driver med forstærker – hvordan styres servoen?
For at styre servoen kræves en controller, som hjælper med at opretholde den præcise position af det roterende element og også gemmer alle parametre for servoens forstærkere. Denne tilgang gør det muligt for servoen at udføre præcise og nøjagtige bevægelser af endeelementet. Servoen styres elektronisk, ikke mekanisk, hvilket gør kontrolsystemet meget præcist og nøjagtigt.
Hvad bruges servoencoderen til?
Encoderen er et element, der normalt fysisk er placeret i servomotoren. Den bruges primært til at kontrollere motorens position, måle hastighed og rotationsretning. Dens funktion muliggør opretholdelse af præcis motorkontrol.
Der findes to typer encodere: relative og absolutte. Relative encodere måler forskydningen fra nulpositionen, som oftest indstilles efter opstart eller med software. Absolutte encodere behøver derimod ikke en vedvarende spænding for at bestemme deres position. Deres nulposition er forudbestemt i produktionsfasen og er altid præcis det samme sted.
Servomekanismen med encoder er en mekanisme, der muliggør præcis kontrol af mekaniske bevægelser. Denne mekanisme anvendes i mange områder såsom industriel automation, luftfart og elektronik. Servoen består af motor, gear og encoder.
Servomotoren driver gearkassen, som igen styrer arbejdsstykket. Encoderen bruges til at måle motorens hastighed og rotationsretning samt til at overvåge positionen af arbejdselementet. I en servo fungerer encoderen som en type bevægelsessensor, der giver feedback til kontrolsystemet. Den omdanner den roterende eller lineære bevægelse af maskindele til et elektrisk signal. Dette signal læses f.eks. af en tæller eller PLC i kontrolsystemet og bestemmer nøjagtigt positionen af de forskellige maskinelementer, vinklen, antal omdrejninger af motorakslen, rotationshastighed, retning og position. Takket være denne tilgang er det muligt at opretholde præcis motorkontrol i servoen.
Servo-transmission
Gearkassen er mekanismen, der overfører den energi, som genereres af motoren, til det endelige arbejdselement. Under overførslen af energi til arbejdselementet er det muligt samtidig at ændre drejningsmoment og hastighed. Idéen er at overføre elektricitet fra magnetspolen til akslen. Det er også muligt at ændre rotationsretningen ved at dreje til højre eller venstre.
Et vigtigt punkt at nævne er overgangen fra roterende til lineær bevægelse og omvendt. Gear i servomotorer påtager sig ofte også funktionen at overføre energi over en afstand, hvilket f.eks. kan ske ved hjælp af en V-rem eller kæde. I tilfælde af servomekanismer anvendes oftest mekaniske gear, som er kendetegnet ved høj effektivitet og stor præcision.
Der findes et bredt udvalg af mekaniske gear i industrien, som ofte anvendes i servomotorer.
De mest populære mekaniske transmissioner er:
tandhjul
friktionsgear
kabeltransmission
remtransmission
V-remstransmission
kædetransmission
lejegear
skruegear
planetgear
Der findes også andre typer gear på markedet, som klassificeres efter de fysiske fænomener, der anvendes, herunder:
hydrauliske transmissioner
pneumatiske gear
elektriske gear

Servo mekanisk hus
Det mekaniske hus på servomotorer har to hovedfunktioner:
beskytter motoren mod skader ved eksterne mekaniske og miljømæssige faktorer
gør det muligt at montere motoren i en enhed eller maskine
Husene til servodrev er oftest lavet af metaller, primært aluminiumlegeringer.
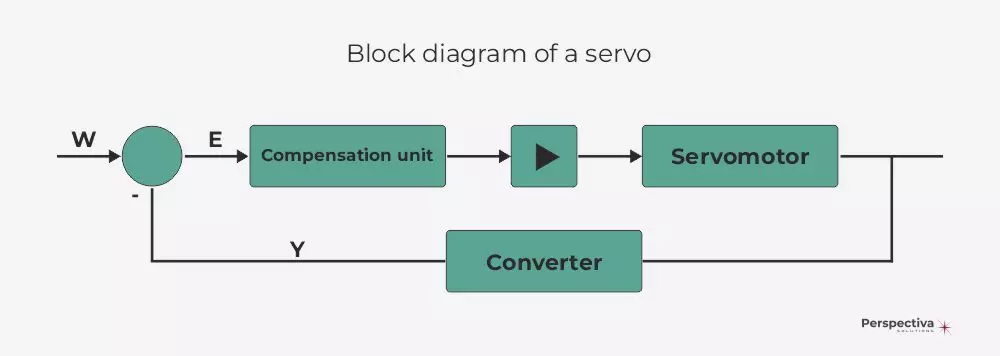
Hvordan fungerer servomekanismen?
Servomotoren er ansvarlig for rotation af maskinens aksler. Med andre ord omdanner den den elektriske energi, der tilføres, til mekanisk energi i form af rotationsbevægelse. Den mekaniske energi fra motoren overføres ikke direkte, men via gear, der justerer akslernes rotationshastighed til det ønskede niveau. Gearene regulerer også drejningsmomentet. Motorens drift styres af en controller, som modtager information fra en anden enhed (f.eks. PLC-controller). Baseret på denne information genererer controlleren passende elektriske signaler til at styre motoren.
En anden meget vigtig komponent er encoderen. Den er placeret i feedback-loopen og giver controlleren information om motorens aktuelle position. Dette muliggør præcis kontrol af rotationsbevægelsen.
Forskellige typer servodrev kan have et ret bredt udvalg af muligheder og konstruktioner. Ikke desto mindre kan vi med en vis forenkling antage, at de indeholder alle de ovennævnte komponenter.
De vigtigste parametre for servoer er:
arbejdstid under overbelastning
drejningsmoment og rotationshastighed
opløsning
frekvensrespons
interfaces
dimensioner
netværksmuligheder
forholdet mellem drejningsmoment og inertia
Forskellige typer servodrev kan have et ret bredt udvalg af muligheder og konstruktioner. Ikke desto mindre kan vi med en vis forenkling antage, at de indeholder alle de ovennævnte komponenter.
Feedback-loop i servo
Feedback-loopen giver information om den aktuelle position af arbejdsstykket. Dette gør det muligt for controlleren præcist at styre motoren for at opnå den ønskede servo-position. Servo-feedback spiller en nøglerolle for præcisionen i servoens drift. Feedback-outputtet består af data (f.eks. position, hastighed, acceleration, forskydning). Man skelner mellem positiv og negativ feedback.
Hvordan fungerer feedback i en servo?
Controlleren bruger en feedback-loop og en encoder til at aflæse motorens aktuelle position. Derefter sammenlignes den ønskede målposition for motoren med den aktuelle position. Driveren beregner forskellen mellem disse værdier. Hvis forskellen er nul, betyder det, at motoren har nået den krævede position. Hvis forskellen er forskellig fra nul, beregner controlleren korrektionen (offset) og driver motoren, indtil forskellen mellem ønsket og faktisk position er nul.
Servo-feedback opnås ved direkte kontrol af motorens elektromagnetiske felt. Denne proces kaldes ofte “fasekontrol”. Ved fasekontrol styres det elektromagnetiske felt for at opnå den ønskede hastighed og drejningsmoment. Fasekontrol anvendes ofte i trappeservo-drev, som skal være meget præcise.
Computerstyring af servodrev udføres ofte med et kontrolkort. Korrekt fasejustering kræver, at kontrolkortet kan aflæse information fra encoderen og justere det elektromagnetiske felt til den ønskede indstilling. For nogle applikationer kan det også være nødvendigt at bestemme, om akslen drejer til venstre eller højre.
Anvendelser af servomekanismer
Servomekanismer anvendes i mange industrier og er kritiske komponenter for korrekt og effektiv drift af maskiner. Servoer anvendes især i forskellige typer industrimaskiner, automation, robotteknologi og modellering. Servoens hovedopgave i maskiner er at bestemme motorakslenes position, synkronisering samt eliminering af styrefejl, f.eks. forskydningsfejl.
Servomekanismer kan også bruges, når det er nødvendigt at styre et roterende element præcist. Ofte anvendes servoer i industrien for at sikre nøjagtig og præcis produktion. De kan også bruges til at styre elementer, der skal flyttes i en bestemt rækkefølge. Derfor bruges servoer ofte på produktionslinjer til at drive produktionslinjen eller andre maskinelementer.
Servomekanismer kan have forskellige dimensioner og parametre, tilpasset behovene i en given applikation. De kan også have ekstra tilbehør (f.eks. skilifter, forgreningskabler, minicomputere). En specifik egenskab ved servomekanismer er deres integrerende natur af aktuatoren med dynamik, der ikke hindrer regulering, men derimod introducerer ikke-linearitet i deres karakteristik. Derfor kræver servoer brug af proportionale regulatorer med høj forstærkning eller trepolet-forstærkere.
Servomekanismer anvendes i applikationer såsom:
håndtag og kontakter
ventiler og spjæld
persienner og skodder
håndtagsmekanismer
håndværktøj
industriel automation
industriel robotteknologi
luftfart
landbrugsmaskiner
CNC-maskiner
biler
modelbygning
Sådan vælger du den rigtige servo til din applikation
Korrekt drift af mange avancerede produktionsmaskiner afhænger af den rigtige valg af servo til maskinen samt optimal drift af hver af dens komplekse komponenter.
Ved valg af den rigtige servo til industriel automation bør flere faktorer overvejes:
type servo (analog, digital)
størrelse (f.eks. mikro, standard) – afhængigt af modellen varierer størrelse og vægt
servo-kraft – bestemmer det genererede drejningsmoment på servoarmen
hastighed – bestemmer, hvor hurtigt servoen roterer den ubelastede trækline
type gear (f.eks. metal, kulstof) – et af elementerne, der genererer servoens kraft
applikationsspecifikke krav – individuel tilpasning af servo til en given enhed
Design af elektriske signalkabler til servomekanismer
Korrekt valg af kabelbundt til en servo-drevet maskine er en mere kompliceret proces, end man måske tror. Forbindelsen af kabler med servoen er afgørende for maskinens korrekte funktion og for det effektive forbindelsessystem i forskellige maskintyper, men det undervurderes ofte.
I forbindelse med kabler brugt i servodrev er det vigtigt at forstå, at arbejdsområdet for disse enheder ofte er områder med høj elektromagnetisk støj. Mange enheder omkring servoen genererer elektromagnetiske bølger, der kan forstyrre funktionen. Derfor skal kablerne i servodrev designes, så forstyrrelser ikke påvirker servoens drift, f.eks. aflæsning af encoderværdier.
Kablerne, der anvendes i servoer, skal opfylde flere nøglekrav:
Effektivt afskærme (blokere) elektromagnetiske bølger ved hjælp af kabler med passende fyldningsgrad af skærmemateriale
Have høj mekanisk modstandsdygtighed
Kunne udføre et specificeret antal bøjningscyklusser ved placering i kabelkæde
Være modstandsdygtige over for kemikalier i servo-drevets arbejdsområde
Afslutningsvis er det vigtigt, at kabler, der arbejder med servomotorer, udvikles og fremstilles med specialistviden og omhu. Ellers kan servoen ganske enkelt ikke fungere.
Tjek vores servo-relaterede tjenester
Note: The use of graphics from the article “How the servo mechanism works in industrial automation?” is allowed as long as the source (link to the page) is mentioned.
Suggested articles related to the topic of servos
- Own production vs. outsourcing – when to commission contract production
- Production outsourcing – The optimal solution for scaling company
- How the electric harness is produced?
- Prototyping of machine wiring
- Bespoke cable harness: designing an electric harnesses for the customer needs
- How to choose an electrical harness correctly?
Popular articles on our blog:




Author