
Hvordan servomekanismen fungerer i industriell automatisering?
Servo-mekanisme er et element som er uløselig knyttet til konseptet industriell automatisering, der presisjon og repeterbarhet må opprettholdes. Den mest vanlige bruken av servomekanismer i industriell automatisering er å kontrollere posisjonen til maskinelementer (f.eks. hode), justere rotasjonshastigheten til rotorer, kontrollere belastning og trykkraft, eller opprettholde konstant dreiemoment. Men la oss gå tilbake til grunnleggende og definere problemstillingene knyttet til servoen.
Hva er servomekanisme?
En servo, også noen ganger kalt servo drive, servo eller servomotor, er en type enhet som utfører roterende bevegelse for å drive komponenter i en maskin.
Egenskaper ved servomekanismer
Servomekanismer kan ha forskjellige dimensjoner og parametere tilpasset behovene i en gitt applikasjon.
Generelt sett, i produksjon av elektronikk, er en servo drive en grunnleggende kontrollmodul for automatisering av industrielle enheter eller maskiner i et lukket system. De elektroniske komponentene i servoen gjør det mulig å konvertere analoge eller digitale kontrollsignaler til presis bevegelse av ende-elementene. Servomekanismen muliggjør nøyaktig justering av parametrene for akselerasjon, hastighet og kraft på glidende ende-elementer basert på tilbakemelding. Drift av servomekanismen basert på tilbakemeldingsprinsippet utføres av en encoder med potentiometer.
Servomekanismer har flere viktige egenskaper:
Mulighet for å flytte store og tunge komponenter
Kan arbeide med svært høye positive og negative akselerasjoner
Arbeide ved høye hastigheter
Presis kontrollmulighet og posisjonsfeedback
Lav følsomhet for arbeidsmiljøforhold
Konstruksjon av servoen
Servomekanismer består av 5 nøkkelkomponenter. Disse er:
Motor
Driver med forsterker
Encoder
Gir
Mekanisk hus
Servo drive / servomotor – motoren i servoen
Motoren i servomekanismen er et av dens grunnleggende elementer, som gjør det mulig å kontrollere nøyaktig posisjon for det roterende elementet i form av motorakslingen, dens akselerasjon og rotasjonshastighet. Servomekanismen drives av en likestrømsmotor (DC) eller vekselstrømsmotor (AC), som kan brukes til presis bevegelseskontroll. Servoer brukes ofte i applikasjoner hvor presisjon og/eller stor kraft må opprettholdes.
Servomotoren kontrolleres via en driver. Den hjelper med å opprettholde presis posisjon for det roterende elementet ved å utføre presise og nøyaktige bevegelser av ende-elementene. Motoren genererer kraft som overføres til de roterende elementene gjennom gir.
Driver med forsterker – hvordan kontrollere servoen?
For å kontrollere servoen kreves en kontroller, som hjelper med å opprettholde den presise posisjonen til det roterende elementet og lagrer alle parametere for servo-forsterkere. En slik tilnærming gjør at servoen kan utføre presise bevegelser av ende-elementet.
Servoen kontrolleres elektronisk, ikke mekanisk. Dette gjør kontrollsystemet svært presist og nøyaktig.
Hva brukes servo-encoderen til?
Encoderen er et element som vanligvis fysisk er plassert i servomotoren. Den brukes primært til å kontrollere motorens posisjon, måle hastighet og rotasjonsretning. Dens funksjon gjør det mulig å opprettholde presis motorkontroll.
Det finnes to typer encodere: relative og absolutte. Relative encodere måler forskyvning fra nullposisjon, som oftest settes etter oppstart eller via programvare. Absolutte encodere, derimot, trenger ikke en kontinuerlig spenning for å bestemme sin posisjon. Deres nullposisjon er forhåndsbestemt i produksjonsfasen og er alltid nøyaktig på samme sted.
Servomekanismen med encoder er en mekanisme som muliggjør presis kontroll av mekaniske bevegelser. Denne mekanismen brukes i mange områder, som industriell automatisering, luftfart og elektronikk. Servoen består av motor, gir og encoder.
Servomotoren driver girboksen, som igjen kontrollerer arbeidsstykket. Encoderen brukes til å måle hastighet og retning på motorens rotasjon, samt overvåke posisjonen til arbeids-elementet. I en servo er en encoder en type bevegelsessensor som er ansvarlig for å gi tilbakemelding til kontrollsystemet. Den fungerer ved å konvertere roterende eller lineære bevegelser av maskindeler til et elektrisk signal. Dette signalet leses for eksempel via en teller eller PLC i maskinens kontrollsystem og bestemmer nøyaktig posisjonen til de ulike maskinelementene, vinkelen, antall omdreininger på motorakslingen, rotasjonshastighet, retning og posisjon. Takket være denne tilnærmingen er det mulig å opprettholde presis motorkontroll i servoen.
Servo-overføring
Girboksen er mekanismen som overfører energien generert av motoren til det endelige arbeids-elementet. Under overføringen av energi til arbeids-elementet er det mulig å endre både dreiemoment og hastighet samtidig. Ideen er å overføre elektrisitet fra magnetspolen til akslingen. Det er også mulig å endre rotasjonsretning ved å dreie til høyre eller venstre.
Et viktig punkt å nevne er overgangen fra roterende til lineær bevegelse og omvendt. Gir i servomotorer får ofte også funksjonen å overføre energi over avstand, og dette gjøres for eksempel ved bruk av V-belter eller kjede. I tilfelle av servomekanismer brukes oftest mekaniske gir som kjennetegnes av høy effektivitet og stor presisjon.
Det finnes et bredt utvalg av mekaniske gir i industrien som ofte brukes i servomotorer.
De mest populære mekaniske transmisjonene er:
tannhjul
friksjonsgir
kabeloverføring
belteoverføring
V-beltoverføring
kjedeoverføring
lagergir
skråstilt gir
planetgir
Det finnes også andre typer gir på markedet, som klassifiseres etter de fysiske prinsippene som brukes, som:
hydrauliske transmisjoner
pneumatiske gir
elektriske gir

Servo mekanisk hus
Det mekaniske huset til servomotorene har to hovedfunksjoner:
beskytter motoren mot skader ved eksterne mekaniske og miljømessige faktorer
gjør det mulig å montere motoren i en enhet eller maskin
Husene til servo drives er oftest laget av metaller, hovedsakelig aluminiumlegeringer.
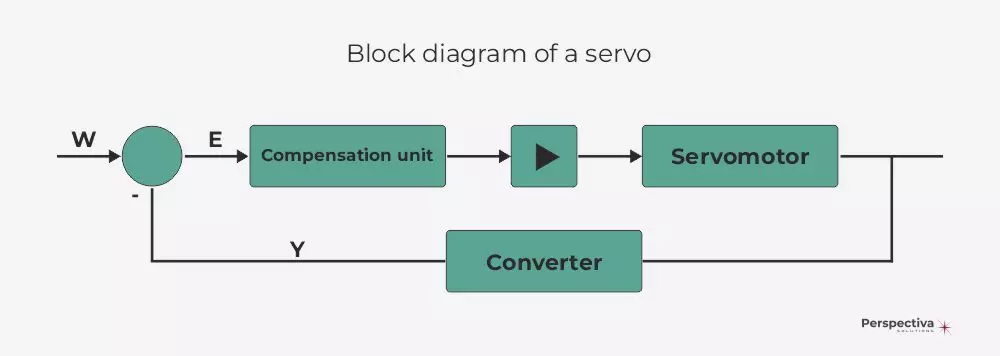
Hvordan fungerer servomekanismen?
Servomotoren er ansvarlig for å rotere maskinens akslinger. Med andre ord omdanner den elektrisk energi som tilføres til mekanisk energi i form av roterende bevegelse. Den mekaniske energien fra motoren overføres ikke direkte, men gjennom gir som justerer rotasjonshastigheten på akslingene til ønsket nivå. De regulerer også dreiemomentet. Motorens drift styres av en kontroller som mottar informasjon fra en annen enhet (f.eks. PLC-kontroller). Basert på denne informasjonen genererer kontrolleren passende elektriske signaler for å styre motoren. En annen svært viktig komponent er en encoder. Den er plassert i tilbakemeldingssløyfen og gir kontrolleren informasjon om motorens nåværende posisjon. Dette muliggjør presis kontroll av rotasjonsbevegelsen.
Forskjellige typer servo drives kan ha et ganske bredt spekter av muligheter og design. Likevel, med en viss forenkling, kan vi anta at de inneholder alle de ovennevnte komponentene.
Hovedparametrene for servoer er:
arbeidstid ved overbelastning
dreiemoment og rotasjonshastighet
oppløsning
frekvensrespons
grensesnitt
dimensjoner
nettverksmuligheter
forhold mellom dreiemoment og treghet
Forskjellige typer servo drives kan ha et ganske bredt spekter av alternativer og design. Likevel, med en viss forenkling, kan vi anta at de inneholder alle de ovennevnte komponentene.
Tilbakemeldingssløyfe i servo
Tilbakemeldingssløyfen gir informasjon om den nåværende posisjonen til arbeidsstykket. Dette gjør det mulig for kontrolleren å nøyaktig styre motoren for å oppnå ønsket servoposisjon. Servo-tilbakemeldingen spiller en nøkkelrolle for presisjonen i servoens drift. Tilbakemeldingsutgangen er noen data (f.eks. posisjon, hastighet, akselerasjon, forskyvning). Vi skiller mellom positiv og negativ tilbakemelding.
Hvordan fungerer tilbakemelding i en servo?
Kontrolleren bruker en tilbakemeldingssløyfe og en encoder for å lese den nåværende posisjonen til motoren. Den sjekker deretter ønsket settverdi for posisjonen motoren skal ha. Driveren beregner forskjellen mellom disse verdiene. Hvis den er lik null, betyr det at motoren har nådd den nødvendige posisjonen. Hvis den derimot er forskjellig fra null, beregner kontrolleren korreksjonen (offset) og styrer motoren til bevegelsen er fullført til forskjellen mellom ønsket verdi og faktisk lest posisjon er null.
Servo-tilbakemeldingen oppnås ved direkte kontroll av motorens elektromagnetiske felt. Denne prosessen kalles ofte «fasekontroll». Ved fasekontroll utføres elektromagnetisk feltkontroll for å oppnå ønsket hastighet og dreiemoment. Fasekontroll brukes ofte, for eksempel, i trappeservo drives, som må være svært nøyaktige.
Datastyring av servo drives utføres ofte med et kontrollkort. Korrekt fasejustering krever at kontrollkortet kan lese informasjon fra encoderen og justere det elektromagnetiske feltet til ønsket innstilling. For enkelte applikasjoner kan det også være nødvendig å bestemme om akslingen dreies til venstre eller høyre.
Bruksområder for servomekanismer
Servomekanismer brukes i mange industrier. De er kritiske komponenter for korrekt og effektiv drift av maskinene. Servoer brukes spesielt i ulike typer industrimaskiner, automatisering, robotikk og modellbygging. Hovedoppgaven til servoen i maskiner er å bestemme posisjonen til motorakslingen, dens synkronisering, samt eliminere kontrollfeil, f.eks. forskyvningsfeil.
Servomekanismer kan også brukes når det er nødvendig å kontrollere et roterende element presist. Ofte brukes servoer i industrien for å sikre nøyaktig og presis produksjon. De kan også brukes til å kontrollere elementer som må flyttes i en bestemt rekkefølge. Som et resultat brukes servoer ofte i produksjonslinjer, der de driver produksjonslinjen eller andre maskinelementer.
Servomekanismer kan ha ulike dimensjoner og parametere tilpasset behovene i en gitt applikasjon. De kan også ha ekstra tilbehør (f.eks. skiheiser, forgreningskabler, minidatamaskiner). En spesifikk egenskap ved servomekanismer er deres integrerende natur av aktuatoren med dynamikk som ikke hindrer regulering, men som igjen gir ikke-linearitet i deres karakteristikker. På grunn av dette krever servoer bruk av proporsjonale regulatorer med høy forsterkning eller trefaseforsterkere.
Servomekanismer brukes i applikasjoner som:
spaker og brytere
ventiler og dempere
persienner og skodder
spakmekanismer
håndverktøy
industriell automatisering
industrirobotikk
luftfart
landbruksmaskiner
CNC-maskiner
biler
modellbygging
Hvordan velge servo til din applikasjon?
Korrekt drift av mange avanserte produksjonsmaskiner avhenger av riktig valg av servo for maskinen, samt optimal drift av hver av dens komplekse elementer.
Når man velger riktig servo brukt i industriell automatisering, bør flere faktorer tas i betraktning:
type servo (analog, digital)
størrelse (f.eks. mikro, standard) – avhengig av modell varierer de i størrelse og vekt
servo-kraft – bestemmer dreiemomentet generert på servoarmen
driftsfart – bestemmer hastigheten servoen roterer den ubelastede draglinen med
type gir (f.eks. metall, karbon) – en av elementene som genererer servoens kraft
applikasjonsspesifisitet – individuell valg av servo for en gitt enhet
Design av elektriske signalkabler brukt i servomekanismer
Riktig valg av kabelnett for en servodrevet maskin er en mer komplisert prosess enn man kanskje tror. Tilkoblingen av kabler til servoen er et nøkkel-element for riktig drift av maskinen og for det effektive tilkoblingssystemet som brukes i maskiner av ulike typer. Dette blir imidlertid ofte undervurdert. I konteksten av kabelnett brukt i servo drives er det avgjørende å forstå at arbeidsmiljøet for disse enhetene vanligvis er områder med svært høyt nivå av såkalt elektromagnetisk støy. Det finnes mange enheter rundt servoen som genererer støy i form av elektromagnetiske bølger. Derfor må kablene som brukes i servo drives utformes slik at interferens ikke påvirker servoens drift, for eksempel leseverdiene fra encoderen.
Kabler som brukes i servoer må oppfylle flere nøkkelkrav:
må effektivt skjerme (blokkere) elektromagnetiske bølger takket være kabler med riktig grad av fyllingsfaktor av sidens overflate med skjermmateriale
ha høy mekanisk motstand
kunne tåle et spesifisert antall bøyesykluser ved plassering i kabelkjede
demonstrere motstand mot kjemikalier som kan være til stede i driftsmiljøet for en servodrevet maskin
Avslutningsvis er det viktig at kabler som arbeider med servomotorer utvikles og produseres med spesialistkunnskap og nødvendig forsiktighet. Ellers kan servoen rett og slett ikke fungere.
Sjekk ut våre servo-relaterte tjenester
Note: The use of graphics from the article «How the servo mechanism works in industrial automation?» is allowed as long as the source (link to the page) is mentioned.
Suggested articles related to the topic of servos
- Own production vs. outsourcing – when to commission contract production
- Production outsourcing – The optimal solution for scaling company
- How the electric harness is produced?
- Prototyping of machine wiring
- Bespoke cable harness: designing an electric harnesses for the customer needs
- How to choose an electrical harness correctly?
Popular articles on our blog:




Author