
Kuinka servomekanismi toimii teollisuusautomaatiossa?
Servo-mekanismi on elementti, joka liittyy erottamattomasti teollisuusautomaation käsitteeseen, siellä missä tarkkuus ja toistettavuus on ylläpidettävä. Yleisin servomekanismien sovellus teollisuusautomaation alalla on koneen osien (esim. pään) sijainnin ohjaaminen, roottoreiden pyörimisnopeuden säätäminen, jännitysten ja painevoiman hallinta tai vakion vääntömomentin ylläpitäminen. Palataan kuitenkin perusteisiin ja määritellään servoon liittyvät kysymykset.
Mikä on servo-mekanismi?
Servo, jota joskus kutsutaan myös servovetimeksi, servoksi tai servomoottoriksi, on laite, joka tuottaa pyörivää liikettä koneen komponenttien ohjaamiseksi.
Servo-mekanismien ominaisuudet
Servomekanismit voivat olla erikokoisia ja -parametrisia, sovitettuna tietyn sovelluksen tarpeisiin.
Yleisesti ottaen elektroniikan tuotannossa servovetimenä toimii perusohjausmoduuli teollisten laitteiden tai koneiden automaatioon suljetussa järjestelmässä. Servossa olevat elektroniset komponentit mahdollistavat analogisten tai digitaalisten ohjaussignaalien muuntamisen tarkaksi liikkeeksi lopullisissa elementeissä. Servomekanismi mahdollistaa tarkat säädöt kiihtyvyyden, nopeuden ja liukuvien lopputelementtien voiman parametreihin palautteen perusteella. Servomekanismin toiminta palautteen periaatteen mukaisesti toteutetaan enkooderilla, jossa on potentiometri.
Servomekanismeilla on useita tärkeitä ominaisuuksia:
Mahdollisuus siirtää suuria ja raskaita komponentteja
Kyky toimia hyvin suurilla positiivisilla ja negatiivisilla kiihtyvyyksillä
Toiminta korkeilla nopeuksilla
Tarkka ohjauskyky ja asennon palautteen mittaus
Alhainen herkkyys työympäristön olosuhteille
Servon rakenne
Servomekanismit koostuvat viidestä keskeisestä komponentista:
Moottori
Ohjain vahvistimella
Enkooderi
Vaihteisto
Mekaaninen kotelo
Servo-vetimen / servomoottorin rooli
Servomekanismin moottori on yksi sen peruselementeistä, joka mahdollistaa pyörivän osan tarkan sijainnin, kiihtyvyyden ja pyörimisnopeuden hallinnan. Servomekanismi saa voimansa tasavirtamoottorista (DC) tai vaihtovirtamoottorista (AC), jota voidaan käyttää liikkeen tarkkaan ohjaukseen. Servoja käytetään usein sovelluksissa, joissa vaaditaan tarkkuutta ja/tai suurta voimaa.
Servomoottoria ohjataan ohjaimella. Se auttaa ylläpitämään tarkkaa pyörivän osan sijaintia tekemällä tarkkoja ja täsmällisiä liikkeitä lopullisilla elementeillä. Moottori tuottaa voiman, joka siirtyy pyöriviin osiin vaihteiston kautta.
Ohjain vahvistimella – miten servoa ohjataan?
Servon ohjaamiseen tarvitaan ohjain, joka auttaa ylläpitämään pyörivän osan tarkkaa sijaintia ja tallentaa kaikki servovahvistimien parametrit. Tällainen lähestymistapa mahdollistaa servon tarkat ja täsmälliset liikkeet lopullisessa elementissä.
Servo ohjataan elektronisesti, ei mekaanisesti, mikä tekee ohjausjärjestelmästä erittäin tarkan ja luotettavan.
Mihin servon enkooderiä käytetään?
Enkooderi on elementti, joka sijaitsee yleensä fyysisesti servomoottorissa. Sitä käytetään pääasiassa moottorin sijainnin ohjaukseen, nopeuden ja pyörimissuunnan mittaamiseen. Sen toiminta mahdollistaa tarkan moottorinohjauksen.
Enkoodereita on kahta tyyppiä: suhteellisia ja absoluuttisia. Suhteelliset enkooderit mittaavat siirtymän nollasijainnista, joka asetetaan yleensä virran kytkemisen jälkeen tai ohjelmiston avulla. Absoluuttiset enkooderit puolestaan eivät tarvitse jännitettä sijaintinsa määrittämiseen. Niiden nollasijainti on määritetty valmistusvaiheessa ja se on aina täsmälleen samassa paikassa.
Servomekanismi enkooderilla on mekanismi, joka mahdollistaa tarkat mekaaniset liikkeet. Tätä mekanismia käytetään monilla aloilla, kuten teollisuusautomaatiassa, ilmailussa ja elektroniikassa. Servo koostuu moottorista, vaihteistosta ja enkooderista.
Servomoottori pyörittää vaihteistoa, joka puolestaan ohjaa työkappaletta. Enkooderia käytetään moottorin pyörimisnopeuden ja suunnan mittaamiseen sekä työelementin sijainnin seurantaan. Servossa enkooderi toimii liikkeenohjausanturin tavoin ja vastaa palautteen antamisesta ohjausjärjestelmälle. Se muuntaa koneen osien pyörivän tai lineaarisen liikkeen sähköiseksi signaaliksi. Tämä signaali luetaan esimerkiksi laskurilla tai koneen PLC:llä ohjausjärjestelmässä ja määrittää tarkasti eri koneen osien sijainnin, kulman, moottorin akselin kierrosluvun, pyörimisnopeuden, suunnan ja sijainnin. Tällaisen lähestymistavan ansiosta servossa voidaan ylläpitää tarkkaa moottorinohjausta.
Servo-vaihteisto
Vaihteisto on mekanismi, joka siirtää moottorin tuottaman energian lopulliseen työelementtiin. Energian siirron aikana työelementtiin on mahdollista muuttaa samanaikaisesti sen vääntömomenttia ja nopeutta. Ajatuksena on siirtää sähköenergia magneettikäämiltä akselille. On myös mahdollista muuttaa pyörimissuuntaa kääntämällä oikealle tai vasemmalle.
Tärkeä seikka mainittavaksi on pyörivän liikkeen muuttaminen lineaariseksi ja päinvastoin. Servomoottoreiden vaihteet saavat usein myös tehtävän siirtää energiaa etäisyyksien yli, mikä toteutetaan esimerkiksi V-hihnan tai ketjun avulla. Servomekanismeissa yleisimmin käytetään mekaanisia vaihteita, jotka ovat tehokkaita ja erittäin tarkkoja.
Teollisuudessa on laaja valikoima mekaanisia vaihteita, joita käytetään usein servomoottoreissa.
Suosituimmat mekaaniset siirrot ovat:
hammaspyörästö,
kitkavaihde,
kaapelinsiirto,
hihnasiirto,
V-hihnasiirto,
ketjuveto,
laakerivaihteisto,
vinohammaspyörä,
planeettavaihde.
Markkinoilla on myös muita vaihteen tyyppejä, jotka luokitellaan käytettyjen fysikaalisten ilmiöiden mukaan:
hydrauliset siirrot,
pneumaattiset vaihteet,
sähköiset vaihteet.

Servo-mekaaninen kotelo
Servomoottoreiden mekaaninen kotelo vastaa kahdesta päätehtävästä:
suojaa moottoria vaurioilta ulkoisten mekaanisten ja ympäristötekijöiden vaikutuksesta,
mahdollistaa moottorin asentamisen laitteeseen tai koneeseen.
Servo-vetimien kotelot valmistetaan useimmiten metalleista, pääasiassa alumiiniseoksista.
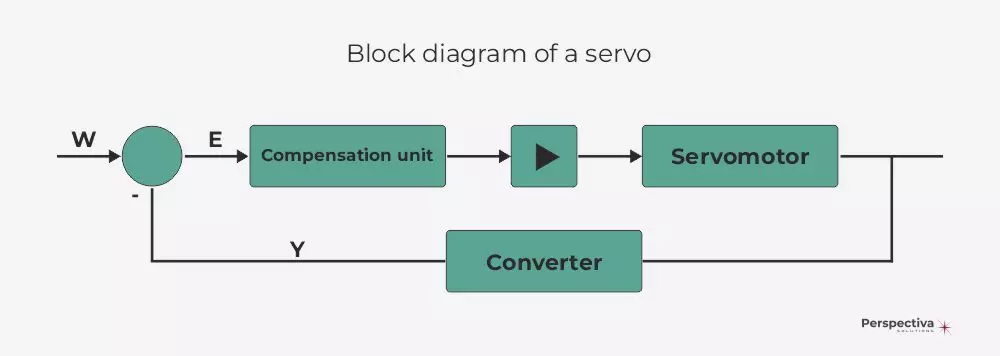
Kuinka servo-mekanismi toimii?
Servomoottori vastaa koneen akselien pyörittämisestä. Toisin sanoen se muuntaa sille syötetyn sähköenergian pyöriväksi mekaaniseksi energiaksi. Moottorin mekaaninen energia siirtyy ei suoraan, vaan vaihteiden kautta, jotka säätävät akselien pyörimisnopeuden halutulle tasolle. Ne säätelevät myös vääntömomenttia. Moottorin toimintaa ohjaa ohjain, joka vastaanottaa tietoja toisesta laitteesta (esim. PLC-ohjain). Ohjain perustuen näihin tietoihin tuottaa sopivat sähköiset signaalit moottorin ohjaukseen. Toinen erittäin tärkeä komponentti on enkooderi. Se sijaitsee palautesilmukassa ja toimittaa ohjaimelle tietoa moottorin nykyisestä sijainnista. Tämä mahdollistaa pyörivän liikkeen tarkan ohjauksen.
Erilaisilla servo-vetimeillä voi olla varsin laaja valikoima mahdollisuuksia ja rakenteita. Yksinkertaistamisen kautta voidaan kuitenkin olettaa, että ne sisältävät kaikki yllä mainitut komponentit.
Servojen pääparametrit ovat:
käyttöaika ylikuormituksessa,
vääntömomentti ja pyörimisnopeus,
resoluutio,
taajuusvaste,
rajapinnat,
mitat,
verkkovaihtoehdot,
vääntömomentin ja inertia-suhde.
Erilaisilla servo-vetimeillä voi olla varsin laaja valikoima vaihtoehtoja ja rakenteita. Yksinkertaistamisen kautta voidaan kuitenkin olettaa, että ne sisältävät kaikki yllä mainitut komponentit.
Servon palautesilmukka
Palautesilmukka antaa tietoa työkappaleen nykyisestä sijainnista. Tämä mahdollistaa ohjaimen tarkasti hallita moottoria saavuttaakseen halutun servon asennon. Servon palaute on keskeinen tekijä servon tarkkuudessa. Palautteessa oleva tieto voi olla esimerkiksi sijainti, nopeus, kiihtyvyys tai siirtymä. Erotamme positiivisen ja negatiivisen palautteen.
Miten palaute toimii servossa?
Ohjain käyttää palautesilmukkaa ja enkooderia moottorin nykyisen sijainnin lukemiseen. Sen jälkeen tarkistetaan haluttu asetusarvo, jonka moottorin tulisi saavuttaa. Ohjain laskee näiden arvojen välisen eron. Jos ero on nolla, moottori on saavuttanut vaaditun sijainnin. Jos ero on eri kuin nolla, ohjain laskee korjauksen (offsetin) ja ohjaa moottoria liikkeeseen, kunnes asetuksen ja todellisen sijainnin välinen ero on nolla.
Servon palaute saavutetaan moottorin magneettikentän suoralla ohjauksella. Tätä prosessia kutsutaan usein ”vaiheen ohjaukseksi”. Vaiheen ohjauksessa magneettikenttää säädetään halutun nopeuden ja vääntömomentin saavuttamiseksi. Vaiheen ohjausta käytetään usein esimerkiksi portaallisissa servovetimeissä, jotka vaativat erittäin tarkkaa toimintaa.
Servovetimien tietokoneohjaus toteutetaan usein ohjauskortin avulla. Oikea vaiheen säätö edellyttää, että ohjauskortti pystyy lukemaan tietoa enkooderista ja säätämään magneettikentän halutuksi. Joissakin sovelluksissa on myös tarpeen määrittää, kääntyykö akseli vasemmalle vai oikealle.
Servomekanismien sovellukset
Servomekanismeja käytetään monilla teollisuudenaloilla. Ne ovat kriittisiä komponentteja koneiden oikealle ja tehokkaalle toiminnalle. Servoja käytetään erityisesti erilaisissa teollisuuskoneissa, automaatiossa, robotiikassa ja mallinnuksessa. Servon päätehtävä koneissa on moottorin akselin sijainnin määrittäminen, sen synkronointi sekä ohjausvirheiden, kuten siirtymävirheen, poistaminen.
Servomekanismeja voidaan käyttää myös silloin, kun pyörivän elementin tarkka ohjaus on välttämätöntä. Usein servoja käytetään teollisuudessa varmistamaan tarkka ja täsmällinen tuotanto. Niitä voidaan käyttää myös esineiden ohjaukseen, jotka on siirrettävä tiettyyn järjestykseen. Tämän seurauksena servoja käytetään usein tuotantolinjoilla, joissa ne ohjaavat tuotantolinjaa tai muita koneen osia.
Servomekanismit voivat olla erikokoisia ja -parametrisia sovelluksen tarpeiden mukaan. Ne voivat sisältää myös lisävarusteita, kuten hissit, haaroituskabellit tai minitietokoneet. Servomekanismien erityispiirre on toimilaitteen integroiva luonne, jossa dynamiikka ei estä säätöä, mutta tuo epäsuoruutta ominaisuuksiin. Tämän vuoksi servoissa tarvitaan korkean vahvistuksen suhteellisia säätimiä tai kolminapaisia vahvistimia.
Servomekanismeja käytetään esimerkiksi seuraavissa sovelluksissa:
vivut ja kytkimet,
venttiilit ja sulkijat,
kaihtimet ja luukut,
vivustot,
käsityökalut,
teollisuusautomaatio,
teollisuusrobotiikka,
lentokoneet,
maatalouskoneet,
CNC-koneet,
autot,
mallien valmistus.
Miten valita servo sovellukseesi?
Monien kehittyneiden tuotantokoneiden oikea toiminta riippuu servon sopivasta valinnasta koneeseen sekä sen monimutkaisten osien optimaalista toimintaa.
Servon valinnassa teollisuusautomaatiota varten on huomioitava useita tekijöitä:
servon tyyppi (analoginen, digitaalinen),
koko (esim. mikro, standardi) – mallista riippuen ne eroavat koon ja painon suhteen,
servovoima – määrää servovivulle tuotetun vääntömomentin arvon,
toiminnan nopeus – määrää servon pyörimisnopeuden kuormittamattomalla vetolinjalla,
vaihteiston tyyppi (esim. metalli, hiili) – yksi elementeistä, joka tuottaa servon voiman,
sovelluksen erityispiirre – servon yksilöllinen valinta tietylle laitteelle.
Signaalien sähköjohtosarjojen suunnittelu servomekanismeissa
Oikea johtosarjan valinta servokäyttöiselle koneelle on monimutkaisempi prosessi kuin miltä se saattaa vaikuttaa. Kaapeleiden liittäminen servoon on keskeinen tekijä koneen asianmukaisessa toiminnassa ja tehokkaassa liitäntäjärjestelmässä. Tämä usein aliarvioidaan. Servovetimissä käytettävien kaapelisarjojen kontekstissa on tärkeää ymmärtää, että näiden laitteiden työympäristö on yleensä alueita, joilla on erittäin korkea ns. sähkömagneettinen häiriö. Servon ympärillä on monia laitteita, jotka tuottavat kohinaa sähkömagneettisina aaltomuotoina. Tämän vuoksi servossa käytettävät kaapelisarjat on suunniteltava siten, että häiriöt eivät vaikuta servon toimintaan, esimerkiksi enkooderin lukemiin.
Servossa käytettävien johtosarjojen on täytettävä useita keskeisiä vaatimuksia:
niiden on tehokkaasti suojattava (blokattava) sähkömagneettisia aaltoja sopivasti täytetyllä suojamateriaalilla kaapelin sivupinnalla,
niillä on korkea mekaaninen kestävyys,
niiden on kyettävä suorittamaan määritelty määrä taivutussyklejä kaapelin sijoittamisen yhteydessä kaapeliketjuun,
niiden on osoitettava kemiallista kestävyyttä, joka voi esiintyä servokäyttöisen koneen työympäristössä.
Yhteenvetona on tärkeää, että servomoottorien kanssa käytettävät kaapelisarjat kehitetään ja valmistetaan asiantuntijatiedon ja huolellisuuden avulla. Muussa tapauksessa servo ei välttämättä toimi.
Tutustu servoon liittyviin palveluihimme
Note: The use of graphics from the article ”How the servo mechanism works in industrial automation?” is allowed as long as the source (link to the page) is mentioned.
Suggested articles related to the topic of servos
- Own production vs. outsourcing – when to commission contract production
- Production outsourcing – The optimal solution for scaling company
- How the electric harness is produced?
- Prototyping of machine wiring
- Bespoke cable harness: designing an electric harnesses for the customer needs
- How to choose an electrical harness correctly?
Popular articles on our blog:




Author